

La eroj, kiujn ni diskutos en ĉi tiu ĉapitro, estas:
Rapida precizeco/glateco/vivdaŭro kaj bontenebleco/polva generado/efikeco/varmo/vibrado kaj bruo/degasaj kontraŭrimedoj/uzmedio
1. Girostabileco kaj precizeco
Kiam la motoro estas movata je konstanta rapideco, ĝi konservos unuforman rapidecon laŭ inercio ĉe alta rapideco, sed ĝi varios laŭ la kerna formo de la motoro ĉe malalta rapideco.
Por senbroŝaj motoroj kun fendetoj, la altiro inter la fenditaj dentoj kaj la rotormagneto pulsos je malaltaj rapidoj. Tamen, en la kazo de nia senbroŝa senfenda motoro, ĉar la distanco inter la statorkerno kaj la magneto estas konstanta en la cirkonferenco (signifante, ke la magnetorezisto estas konstanta en la cirkonferenco), estas malverŝajne, ke ĝi produktos ondetojn eĉ je malaltaj tensioj. Rapido.
2. Vivotempo, bontenebleco kaj polvogenerado
La plej gravaj faktoroj kiam oni komparas brosajn kaj senbrosajn motorojn estas la vivdaŭro, prizorgebleco kaj polvogenerado. Ĉar la broso kaj la kolektoro kontaktas unu la alian kiam la brosmotoro rotacias, la kontakta parto neeviteble eluziĝos pro frotado.
Rezulte, la tuta motoro bezonas esti anstataŭigita, kaj polvo pro eluziĝaj rubaĵoj fariĝas problemo. Kiel la nomo sugestas, senbrosaj motoroj ne havas brosojn, do ili havas pli bonan vivdaŭron, pli facilecon de prizorgado kaj produktas malpli da polvo ol brositaj motoroj.
3. Vibrado kaj bruo
Brositaj motoroj produktas vibradon kaj bruon pro frotado inter la broso kaj la kolektoro, dum senbrosaj motoroj ne. Fenditaj senbrosaj motoroj produktas vibradon kaj bruon pro fenda tordmomanto, sed fenditaj motoroj kaj kavaj tasmotoroj ne.
La stato, en kiu la rotacia akso de la rotoro devias de la pezocentro, nomiĝas malekvilibro. Kiam la malekvilibra rotoro rotacias, vibro kaj bruo generiĝas, kaj ili pliiĝas kun la pliiĝo de la motorrapido.
4. Efikeco kaj varmogenerado
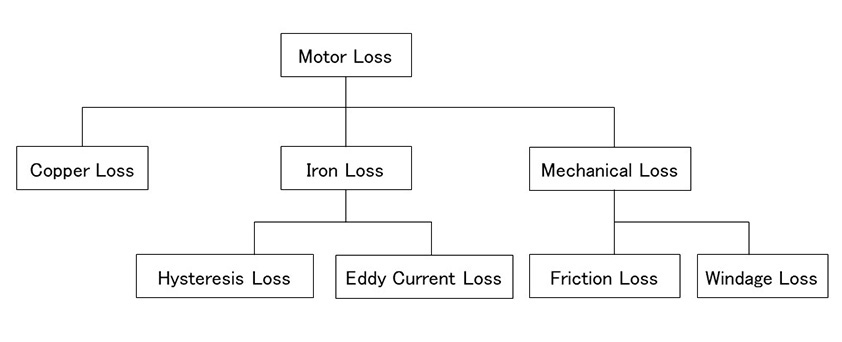
La rilatumo inter la eligata mekanika energio kaj la enigata elektra energio estas la efikeco de la motoro. La plej multaj el la perdoj, kiuj ne fariĝas mekanika energio, fariĝas termika energio, kiu varmigos la motoron. Motorperdoj inkluzivas:
(1). Kuproperdo (potencperdo pro volva rezisto)
(2). Perdo de fero (perdo de histerezo de statora kerno, perdo de kirlofluoj)
(3) Mekanika perdo (perdo kaŭzita de frikcia rezisto de lagroj kaj brosoj, kaj perdo kaŭzita de aerrezisto: perdo de ventorezisto)
Kuproperdo povas esti reduktita per dikiĝo de la emajlita drato por malpliigi la bobenreziston. Tamen, se la emajlita drato estas farita pli dika, la bobenoj estos malfacile instaleblaj en la motoron. Tial necesas desegni la bobenstrukturon taŭgan por la motoro per pliigo de la ŝarĝcikla faktoro (la rilatumo de la konduktilo al la transversa sekca areo de la bobeno).
Se la frekvenco de la rotacianta magneta kampo estas pli alta, la ferperdo pliiĝos, kio signifas, ke la elektra maŝino kun pli alta rotacia rapido generos multe da varmo pro la ferperdo. Ĉe ferperdoj, kirlokurentaj perdoj povas esti reduktitaj per maldikigo de la lamenigita ŝtalplato.
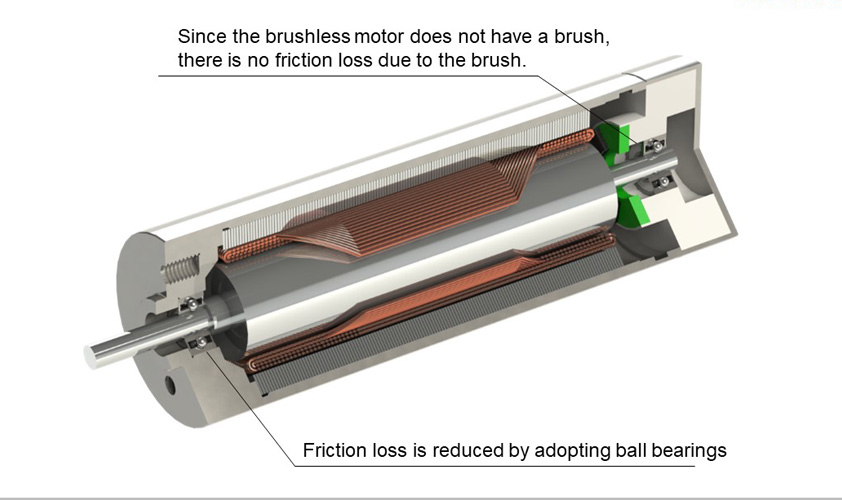
Rilate al mekanikaj perdoj, brositaj motoroj ĉiam havas mekanikajn perdojn pro la frikcia rezisto inter la broso kaj la kolektoro, dum senbrosaj motoroj ne havas. Rilate al lagroj, la frikcia koeficiento de globlagroj estas pli malalta ol tiu de ebenaj lagroj, kio plibonigas la efikecon de la motoro. Niaj motoroj uzas globlagrojn.
La problemo kun hejtado estas, ke eĉ se la apliko ne havas limon pri la varmo mem, la varmo generita de la motoro reduktos ĝian rendimenton.
Kiam la volvaĵo varmiĝas, la rezisto (impedanco) pliiĝas kaj malfacilas por la kurento flui, rezultante en malpliiĝo de la tordmomanto. Krome, kiam la motoro varmiĝas, la magneta forto de la magneto malpliiĝas pro termika malmagnetiĝo. Tial, la generado de varmo ne povas esti ignorata.
Ĉar samario-kobaltaj magnetoj havas pli malgrandan termikan demagnetigon ol neodima magnetoj pro varmo, samario-kobaltaj magnetoj estas elektitaj en aplikoj kie la motortemperaturo estas pli alta.
Afiŝtempo: 21-a de Julio, 2023